


Noticia
2026-04-03
Si necesita incluir "radar láser" junto a LiDAR para mayor claridad, puede usarse "LiDAR (radar láser)". En esta traducción se ha optado por "LiDAR" por ser el término técnico estándar.
En el contexto de la continua evolución del monitoreo vehicular y de los sistemas inteligentes, las soluciones que dependen únicamente de Visual AI Perception ya no son suficientes para satisfacer las exigencias de aplicaciones complejas. Esto resulta especialmente evidente en escenarios como minas, obras de construcción, puertos y transporte logístico, donde las condiciones ambientales son cambiantes y las operaciones complejas, lo que exige mayores niveles de estabilidad y fiabilidad en los sistemas de percepción.
Como componente clave del sistema frontal inteligente, STONKAM ha incorporado tecnologías de percepción no visual sobre la base de Visual AI Perception. Esta puede implementarse de forma independiente o en combinación con cámaras de Visual AI Perception, permitiendo, mediante la fusión multisensor, construir una capacidad de percepción del entorno más completa y robusta.
Una cámara de percepción no visual obtiene información del entorno a través de datos no visuales. Sus principales productos incluyen la unidad integrada de radar y visión, LiDAR (radar láser), cámara termográfica (cámara infrarroja), radar de ondas milimétricas y radar ultrasónico digital.
Este tipo de percepción no depende de la imagen en sí, sino que utiliza datos como distancia, temperatura y señales reflejadas para lograr una detección estable de los objetivos, mejorando eficazmente la capacidad de adaptación del sistema en entornos complejos.
A través de las cámaras vehiculares de Visual AI Perception, el sistema puede obtener información visual del entorno del vehículo de forma intuitiva. Sin embargo, en la práctica, Visual AI Perception no es aplicable a todos los escenarios y presenta limitaciones evidentes bajo determinadas condiciones:
● Entornos nocturnos / lluvia / niebla / luz intensa: En condiciones de baja iluminación, precipitaciones o contraluz fuerte, la calidad de la imagen disminuye, afectando la precisión del reconocimiento.
● Obstrucción / polvo / entornos operativos complejos: En minas y obras de construcción, el polvo, las obstrucciones y las estructuras complejas pueden limitar el campo de visión.
● Limitaciones en la estimación de distancia y velocidad: El cálculo basado en imágenes depende de estimaciones algorítmicas, con restricciones en precisión y tiempo real.
Estos factores demuestran que Visual AI Perception por sí sola no puede garantizar una cobertura estable en todas las condiciones climáticas y escenarios. Mediante la incorporación de la percepción no visual, STONKAM compensa eficazmente estas limitaciones, convirtiéndola en un complemento clave del frontal inteligente vehicular.
Desde el punto de vista técnico, ambas difieren en su enfoque: Visual AI Perception se basa en imágenes y se centra en “ver y comprender”, mientras que la percepción no visual utiliza señales físicas como ondas electromagnéticas, radiación infrarroja u ondas sonoras, enfocándose en “detectar y medir”, proporcionando datos precisos de distancia, velocidad y espacio.
En cuanto a la adaptabilidad, Visual AI Perception depende en gran medida de la iluminación, mientras que la percepción no visual opera de forma estable incluso en condiciones de baja visibilidad o clima adverso.
Con el aumento de las exigencias de las aplicaciones, la percepción no visual se ha convertido progresivamente en una capacidad clave dentro de los sistemas de percepción inteligente vehicular, proporcionando un soporte técnico más fiable para la seguridad y la operación estable en entornos complejos.
El valor central de la percepción no visual radica en resolver los problemas de “falta de visibilidad” y “baja fiabilidad” de los sistemas basados en visión en entornos complejos. Sus principales ventajas son:
● Percepción ambiental continua sin dependencia de la iluminación
● Detección estable bajo interferencias como lluvia, niebla o polvo
● Medición de distancia y velocidad de alta precisión
● Mecanismos de alerta multidimensional para mejorar la respuesta ante riesgos
En las soluciones de STONKAM, la percepción no visual actúa como una capacidad clave para mejorar la estabilidad y fiabilidad en condiciones operativas complejas, impulsando la evolución del monitoreo vehicular hacia sistemas más precisos y adaptables.
Para responder a distintos escenarios, STONKAM ha desarrollado una completa gama de productos de percepción no visual:
● Cámara de radar
Combina la detección estable del radar de ondas milimétricas de 77 GHz con la visualización de sistemas de visión, logrando percepción multidimensional en todo tipo de clima. Ofrece alta fiabilidad en entornos con baja visibilidad u obstrucciones.
● LiDAR
Proporciona medición de alta precisión y detección tridimensional, ideal para compensación de ángulos muertos, evitación de obstáculos y posicionamiento.
● Cámaras térmicas
Integra imagen térmica y luz visible con algoritmos AI, funcionando eficazmente en polvo, niebla, baja iluminación o deslumbramiento.
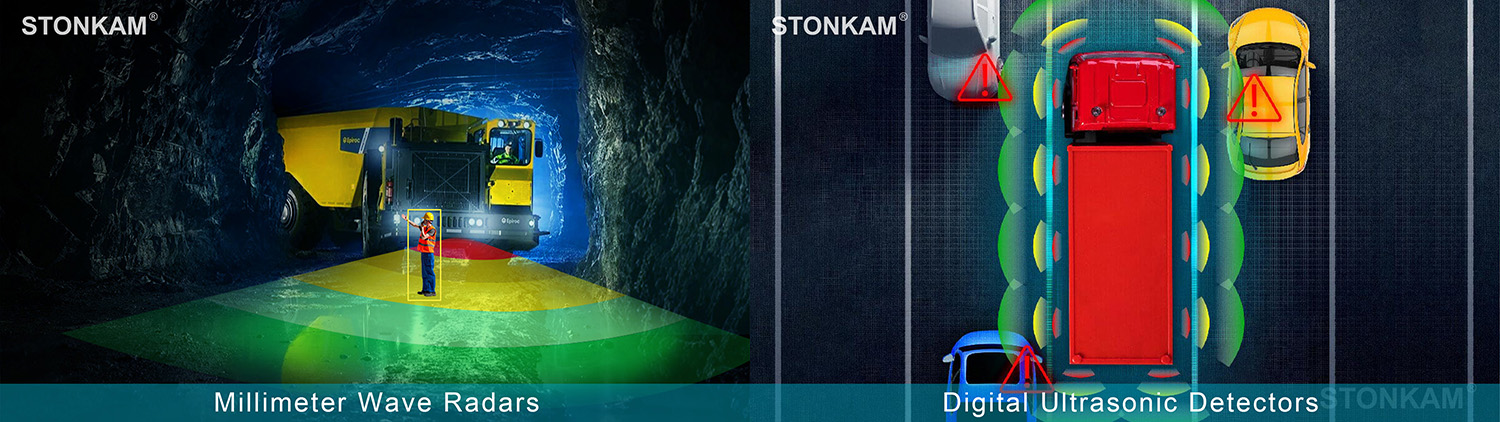
● Radar de ondas milimétricas
Adecuado para detección a media y corta distancia, con alta resistencia a interferencias y alertas en tiempo real.
● Radar ultrasónico
Diseñado para detección de corto alcance, ideal para maniobras a baja velocidad y espacios reducidos.


La integración de percepción no visual aporta valor en múltiples escenarios:
● Minería y construcción: Reduce riesgos en entornos con polvo y condiciones complejas
● Logística y transporte: Mejora la seguridad en conducción nocturna y clima adverso
● Puertos y maquinaria pesada: Reduce ángulos muertos mediante percepción multidireccional
● Transporte público: Mejora la detección de peatones y vehículos no motorizados
Esto no solo eleva la seguridad, sino que también contribuye a la reducción de costos y mejora de la eficiencia operativa.
Con el avance de las tecnologías inteligentes vehiculares, la percepción no visual está pasando de ser una capacidad complementaria a una capacidad central. En el futuro, con el desarrollo de algoritmos y edge computing, la fusión multisensor será aún más profunda, impulsando los sistemas de STONKAM hacia mayores niveles de inteligencia.
En este proceso, la percepción no visual evolucionará junto con Visual AI Perception, construyendo un sistema integral de seguridad para todos los escenarios.
P1: ¿Qué es una cámara de percepción no visual?
Se refiere a un enfoque de detección que utiliza dispositivos como cámaras de radar, LiDAR, cámaras termográficas y detectores ultrasónicos. En lugar de depender del reconocimiento de imágenes, se basa en datos como distancia, velocidad y reflexión de señales para la detección.
P2: ¿Por qué se necesita la percepción no visual?
La percepción visual (Visual AI Perception) se ve afectada por las condiciones de iluminación y el entorno, mientras que la percepción no visual opera de forma independiente de estos factores, garantizando un rendimiento estable en todo tipo de condiciones climáticas.
P3: ¿Qué problemas resuelve la percepción no visual de STONKAM?
Aborda los problemas de visibilidad y estabilidad en entornos complejos, proporcionando una detección fiable, mediciones precisas y reduciendo las falsas alarmas y omisiones.
P4: ¿Qué dispositivos incluyen las soluciones de percepción no visual de STONKAM?
Las soluciones suelen incluir cámaras de radar, LiDAR, cámaras termográficas, detectores ultrasónicos y unidades integradas de radar y visión, configurables según las diferentes necesidades.
P5: ¿Cómo elegir la solución adecuada de percepción no visual de STONKAM?
Se debe evaluar en función de los escenarios de aplicación, las condiciones ambientales y los requisitos funcionales, considerando al mismo tiempo la compatibilidad y la escalabilidad para lograr un equilibrio entre rendimiento, estabilidad y costo.
STONKAM CO., LTD
Dirección: 1/F.,#6Building,Huangzhou Industrial Park, Chebei Rd.,Tianhe,510660 Guangzhou,China
Tel.: (86-20)6667 0988
Fax.: (86-20)6667 0977
E-mail: sales@stonkam.com
WhatsApp: +86 15521270579; +86 15708917305

Copyright ©2002-2022 STONKAM CO.,LTD. 广州敏视数码科技有限公司 ALL Rights Reserved. 广东省通信管理局 粤ICP备05043268号





 Sistema Inteligente con IA
Sistema Inteligente con IA  AIoT
AIoT  Sistema de visión de 360°
Sistema de visión de 360°  Sensor de detección
Sensor de detección  HD Monitors
HD Monitors  Cámara analógica
Cámara analógica  Cámara digital
Cámara digital  CMS
CMS  Inalámbrico digital IA
Inalámbrico digital IA  Reglamentos
Reglamentos  Cámaras térmicas
Cámaras térmicas  Soluciones OEM
Soluciones OEM  Aplicación de la industria
Aplicación de la industria
 Casos de éxito
Casos de éxito  Noticia
Noticia
 Videos
Videos
 Sobre nosotros
Sobre nosotros  Capacidad de empresa
Capacidad de empresa  Cultura
Cultura  Historia
Historia  Certificado
Certificado  Contacto
Contacto  Servicio
Servicio 




















